O
K
E
A
N
O
S
Post room
Post
Posted at 30 Jun, 2025
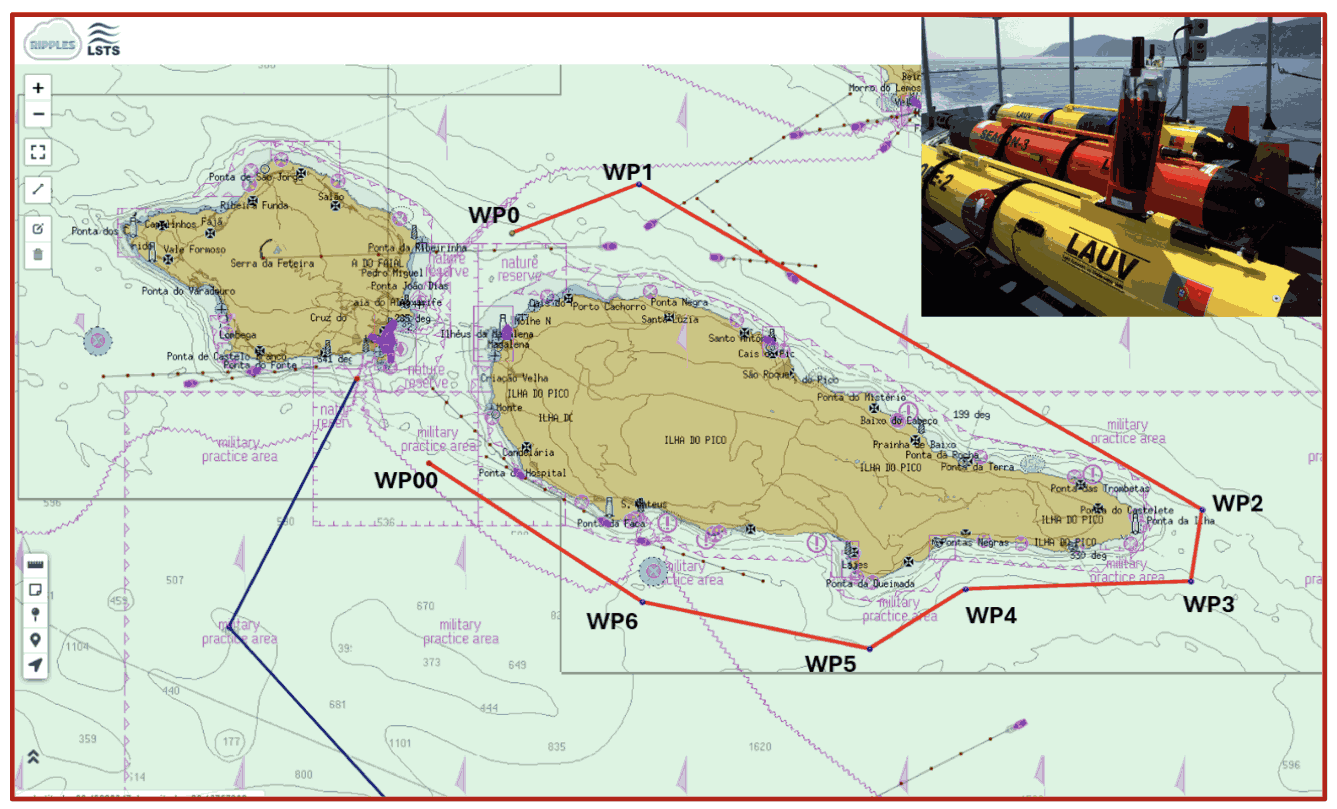
PicoLOOP - Uma Circum-navegação Robótica da Ilha do Pico

Daniela Cruz
30 Jun, 2025 12:52:42


Financiado por fundos nacionais através da FCT - Fundação para a Ciência e a Tecnologia, I.P., no âmbito dos projetos UID/05634/2025 (DOI: 10.54499/UID/05634/2025), UID/PRR/05634/2025 (DOI: 10.54499/UID/PRR/05634/2025) e UID/PRR2/05634/2025 (DOI: 10.54499/UID/PRR2/05634/2025).
Contact us
Find us
OKEANOS - Instituto de Investigação em Ciências do Mar
Universidade dos Açores
Rua Prof. Doutor Frederico Machado, 4,
9901-862 Horta, Faial, Açores, Portugal
OKEANOS


Management

Funding
OKEANOS WEB PORTAL © Okeanos-UAç, All Rights Reserved - 2026 — version 1.0.1
 VALTER MEDEIROS
VALTER MEDEIROS