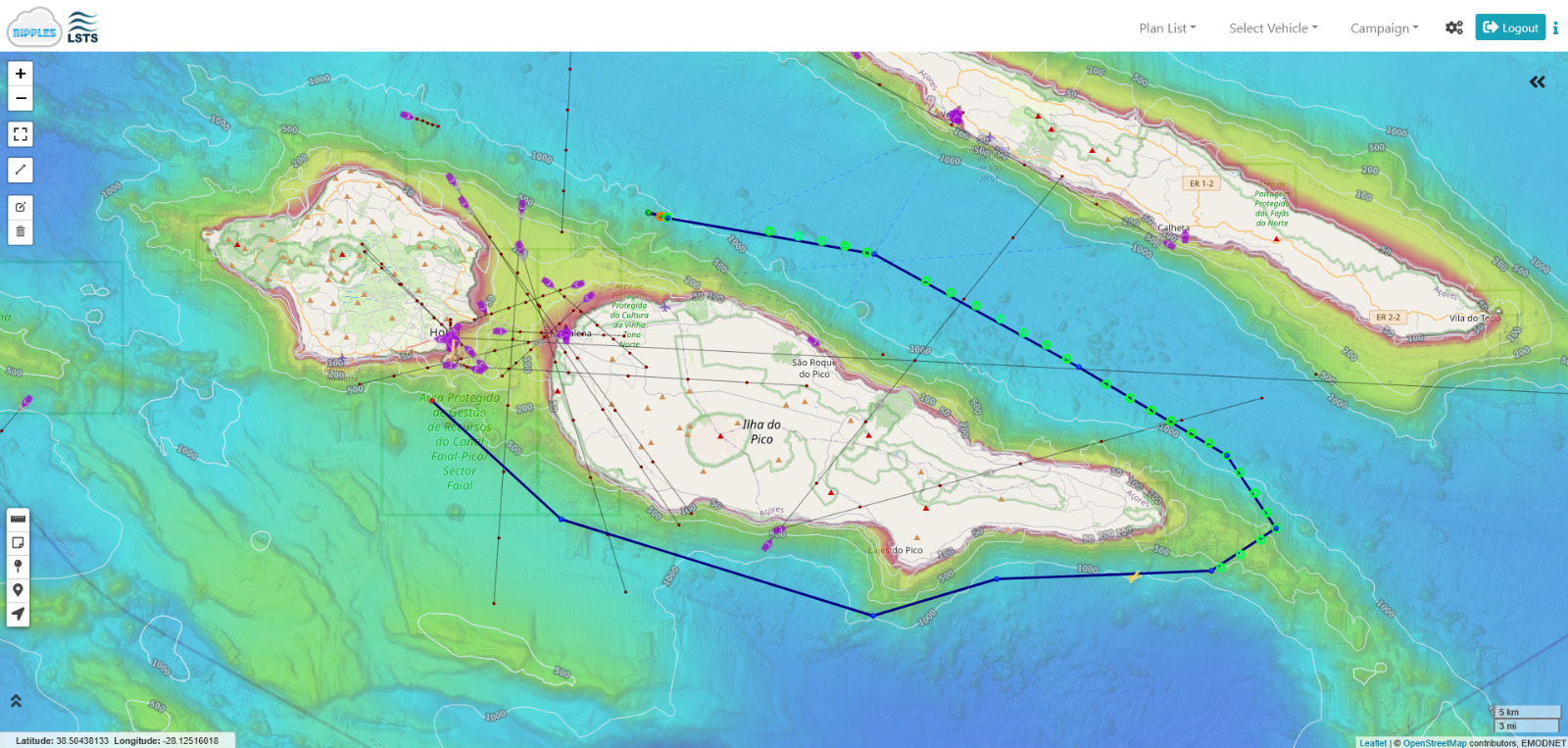
No dia 3 de julho foi lançado ao mar um veículo autónomo submarino (LAUV) que está a realizar a circum-navegação da Ilha do Pico de forma totalmente autónoma. Esta missão científica conta com a participação e colaboração de vários parceiros nacionais e regionais.
A operação decorre entre os dias 3 e 5 de julho, com o robô a ser supervisionado remotamente a partir de um centro de comando localizado no Porto. Durante este período, o LAUV irá recolher dados oceanográficos de salinidade e temperatura ao longo de todo o percurso em redor da ilha.
A missão PicoLOOP tem como objetivo principal demonstrar capacidades de operação remota e distribuída de veículos robóticos marinhos, bem como apoiar a formação avançada em robótica submarina.
Inserida no âmbito do projeto C3-4OCEAN, financiado pelo Plano de Recuperação e Resiliência (PRR) e liderado pela Faculdade de Engenharia da Universidade do Porto (FEUP), esta missão conta com a participação do INEGI, através do LSTS – Laboratório de Sistemas e Tecnologia Subaquática.
🔹 Para além da demonstração tecnológica, a missão visa:
- Demonstrar a capacidade de operações distribuídas com veículos robóticos supervisionados remotamente;
- Promover a cooperação com entidades nacionais, em especial a Universidade dos Açores, a Escola do Mar dos Açores, a Marinha Portuguesa e o Governo Regional dos Açores;
- Estimular sinergias com outros investimentos PRR no Açores, nomeadamente o programa de desenvolvimento do Cluster do Mar dos Açores (TC-C10-i04-RAA);
- Produzir dados científicos de alta resolução em ambientes costeiros e oceânicos desafiantes.
Esta missão serve também como base preparatória para a
Marine Robotics Summer School 2025, que terá lugar entre 7 e 18 de julho na ilha do Faial, organizada pela
Universidade dos Açores,
FEUP,
+ATLANTIC CoLAB e o
MIT Portugal Program. Os dados recolhidos serão analisados pelos estudantes ao longo da escola de verão, proporcionando uma oportunidade única para compreenderem, com base em dados reais, os desafios e decisões associados ao planeamento e execução de missões robóticas.
A PicoLOOP antecipa ainda futuras operações nos Açores, nomeadamente:
· A chegada do veículo autónomo de superfície Caravel, no âmbito do projeto
JUNO – A Robotic Exploration of the Atlantic Waters (Prémio FLAD Science Award Atlantic 2021), uma iniciativa desenvolvida em parceria entre o
+ATLANTIC CoLAB e a
Faculdade de Engenharia da Universidade do Porto (FEUP), que prevê a partida do veículo a partir do Porto com destino à Horta nos próximos dias;
· O arranque do caso de estudo AIMOS – Azores Integrated Modelling for Ocean Sustainability, recentemente aprovado, que contará com operações robóticas ao largo do Faial e com a participação do OKEANOS, +ATLANTIC CoLAB e INEGI.
🌍 A missão
PicoLOOP representa não só um avanço científico e tecnológico, como também um forte exemplo de colaboração nacional, com vista a um Atlântico mais monitorizado, sustentável e acessível através da robótica. Pode acompanhar a missão real-time em
ripples.lsts.pt.
Agradecimentos:
AIMOS - Azores Integrated Modelling for Ocean Sustainability
JUNO - Robotic exploration of Atlantic waters – Refª 2021/0008 - from the Luso-American Development Foundation
C3-4OCEAN – Centro de Comando e Controlo para Veículos Não Tripulados de Apoio a Atividades Offshore da Bioeconomia financiado pelo Plano de Recuperação e Resiliência de Portugal, através do Investimento TC-C10-i01: “Hub Azul, Rede de Infraestruturas para a Economia Azul”.






 VALTER MEDEIROS
VALTER MEDEIROS